
本教学由Zivix原创分享
从这一章开始,我们将围绕一个实例来完成一个系统化的制作流程,这流程中包括一个工程飞船的机械设定,以及他的插图绘制,然后我会在建模软件之中将这个设定3d化,以及最后完成他的动画设置,在这个过程中读者将了解到有关于一个完成的设计与制作的流程。
在进行飞船设计前,我们先从几个简单的练习,这有助于帮助读者了解纯粹概念化的机械设定是怎 么进行的,对于纯粹概念化的机械设定,并没有一个现实之中的实物可以参考,不像我们前面一章所提到的那样,能够利用现实中的设计素材进行形态融合式的设 计,我们必须将一些基础元素进行组合拼接来完成我们所设想的机械。
首先我们通过一个简单的实例来展示一个简单的构思过程,从图2-1中,我们可以看到这是一些 简单的几何体,从表面上看他们似乎没有什么更深层次的联系,他们都是彼此独立的几何体元素,其实不然,他们是我们进行设计的基本要素,如果能够合理的组合 它们,他们就有可能成为一个完整的设计。

从图中我们可以看到这是一些没有关联的物体,我们要如何去组合他们呢?对于圆柱体,我们可以考虑将它设计成液压杆的形状,我们暂时把它安装在最大的立方体的两侧,我们可以试着看以下,这样会产生什么样的效果,如图2-2,我们可以看见,这是一个很基本的机械外形:

这虽然是一个很基本的机械外形,却已经基本具备了机械的一些简单的外观要素,现在看来是十分简单的,无论是组合还是外 观,但是一个复杂的机械,终究归根结底是由这些简单的元素所组成,我们可以对这些元素进行不断地强化,以便于达到我们所需要的效果,这些用于强化效果的元 素,仍是我们上面看到的简单元素所构成,设计者需要考虑的是使他们的组合具有合理性,这需要设计者对现实中的事物进行细致的观察,能够了解到一定的机械知 识,实际上,无论是幻想中的机械设计还是现实中的机械设计,他们都是有这些最基本的简单的几何元素所构成,唯一能够影响它们合理性的因素,就在于他们组合 的方式,也就是说,我们要进行机械设定,需要考虑的是组合的方式,以及所需要使用的几何元素,抓住了这两点,在继续深入细节,就能得出我们所需要的结果 了,图2-3所表示的就是图2-2在细节上深入的结果。

经过上述简单实例,我们了解到尽量贴近与现实的组合方式能够使你收集的元素产生的结果更加真实,也就是说,在进行设定的时候,尽量以现实为衡量标准,才能够取得更为真实的结果。
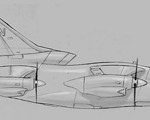
这是另一个稍微复杂一些的例子,图为作者以前制作的一个机械设定的一部分,这是其中的一只脚部的机械构成;(图2-4)

我们可以见到,它是由很多的几何元素构成,作者在设定的过程中,参考了大量的重型机械生产线的图片,以这些真实的照片作为参考无疑是个好主意,它们可以使作者在设定的时候可以最大限度的使设定接近真实。
这个看似比较复杂的机械构成,实际上也是有许多简单的几何元素组成,(图2-5a)通过该图我们可以看到总体由几大部分组成;



为了便于说明,作者为每个部分都作了一个简单的说明,当然,这些名字都是虚构的,只起到一个标注的作用,(图2-5b)

我们在做机械设定时,也最好对所有要设定机械的功能以及他们在这个设定整体中所处位置作一个大概的设计,也就是基本了解它们的功能以及他们在这个设定整体中所处的位置,这样做的好处在于可以使整个设定不仅在外观上而且在功能上更加明确,也更具有真实感。
另一方面为了方便读者理解,作者将这个机械设定分解开来分析;首先如(图2-6a)

这是一个姿态控制器的外形,从(图2-6a)来看,它具有多层的圆柱形嵌套结构,我们可以将它分解开来如(图2-6b)

我们可以看到,这个姿态控制器实际上就是作者先前向读者阐述的,由最基本的几何体组成,
组成的重点在于其组合的方式,就算是相同的几何体,如果用不同的方式组合,也会得到不同的结果。
我们再来看看(图2-7)这是整个脚部最为复杂的地方,看上去,它就如同一个完整的物体,实际上,它仍是多个单一元素的组合体,它所包括的元素为:圆柱体;立方体;以及多边形几何体。(图2-9)

简单的多边形几何体,是重要的组成部分。

我们再来看看 (图2-8),这是腿部的运动机构的分解,它是由很多的大小不等的元素组成,与前面所说的一样,需要我们考虑的是组合的方式,在这里有两个巨大的圆形物体,他们是这个脚部的运动关节,在制作动画时,她将脚分为上下两个部分,脚的上端和下端,分别围绕这两个圆柱体进行运动。

圆柱体几乎是整个设定中出现次数最多的物体,因为现实中的机械构,由很多构件也都是以圆柱体为基准的,多个圆柱体的组合 能形成最为常见的液压杆形态,而这种形态又正好是我们最经常能够在周围见到的机械形态之一,所以合理地利用圆柱体,有效地提高我们的设定的真实感与精密程 度,如(图2-10a,图2-10b)













推荐课程



推荐教程

1回复机械设定概论2"